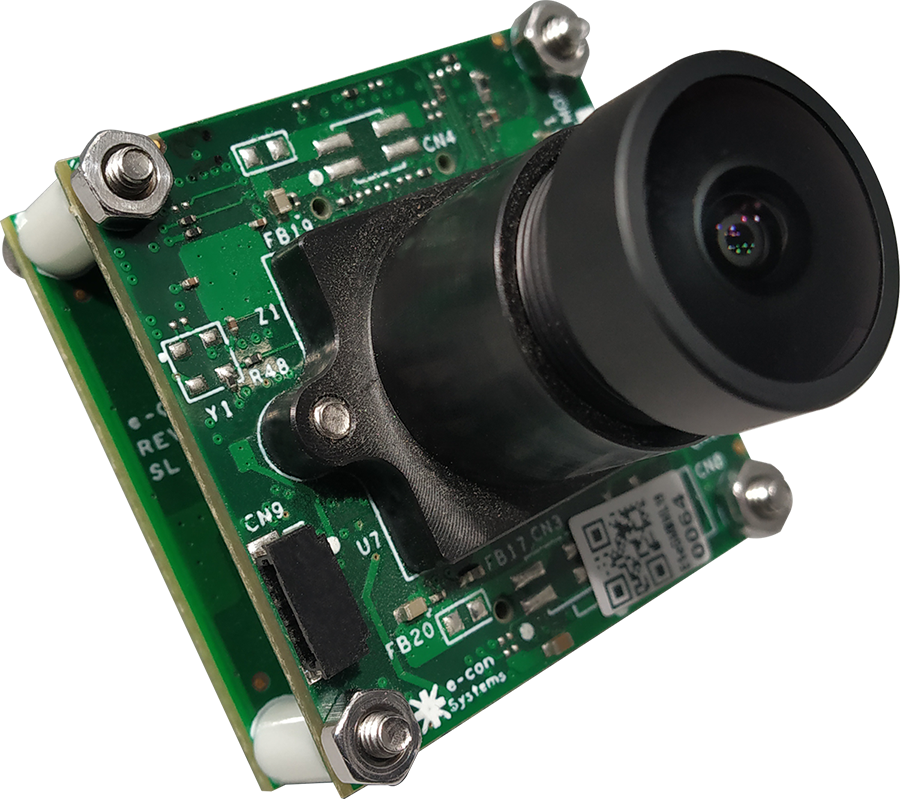
CSI Camera Set 5MP AR0521 Color


Getting Started
This page contains basic information related to the CSI Camera Set 5MP AR0521 Color.
First Steps
To help with the first steps with the CSI Camera Set 5MP AR0521 here follows two articles with guides on cable connections and camera usage on embedded Linux and Torizon OS.
Having trouble?
Please contact our technical support. Various options for technical support are mentioned in the article below.
Features
Main Features
CSI Camera Set 5MP AR0521 Color
Camera Module Features:
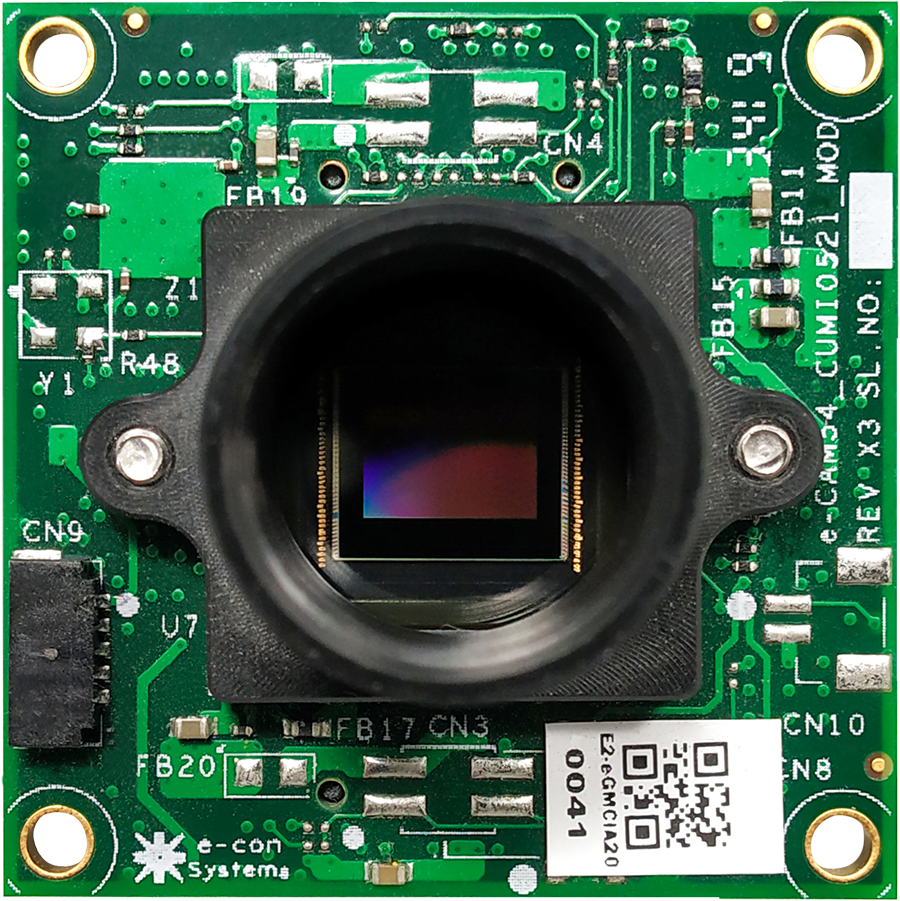
- Sensor: AR0521 from onsemi®
- Sensor Resolution and Optical Format:5MP CMOS Image Sensor. 1/2.5" Optical format
- Sensor Type:5MP CMOS Electronic Rolling Shutter Sensor with Bayer RGB Color Filter Array
- Image Signal Processor:On-board high performance ISP
- Output Format:Uncompressed UYVY format
Sensor Features:
- Pixel size:2.2μm x 2.2μm
- Sensor Active Area:2592(H) x 1944(V)
- Responsivity:18.8 ke-/luxsec
- SNR:40 dB
- Dynamic Range:74.3 dB
- Shutter type:Electronic Rolling Shutter
- Focus Type:Fixed focus
- DFOV:5MP - 140.5° (with the lens provided by e-con)
Datasheets
CSI Camera Set 5MP AR0521 Color V1.1A datasheet
CSI Camera Set 5MP AR0521 Color V1.0A datasheet
CSI Camera Set 5MP AR0521 Color Lens datasheet
Compatible Products
Hardware
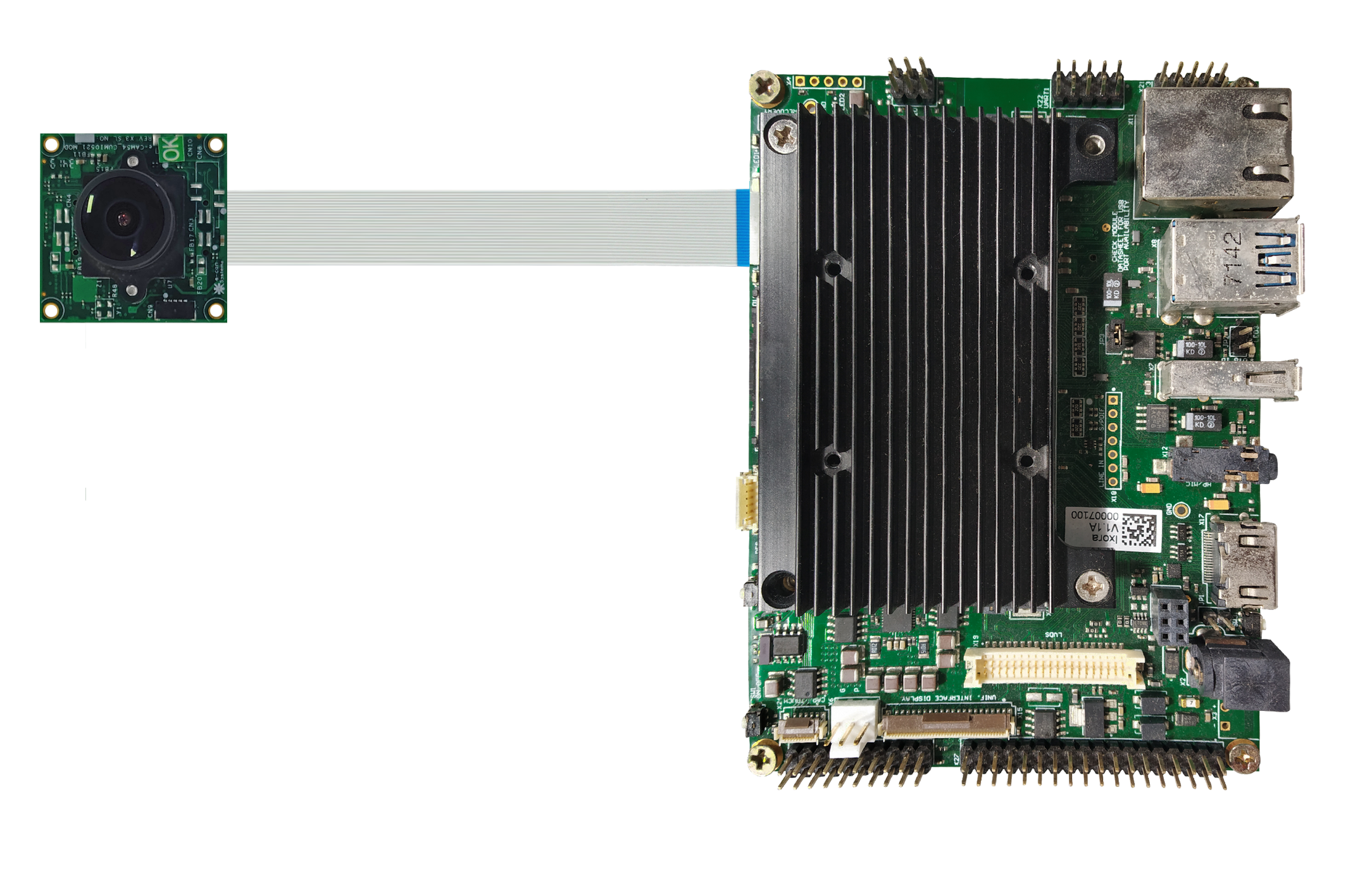
The camera module e-CAM55_CUMI0521_MOD from e-con Systems is sold together with an adapter board and cables as the evaluation kit e-CAM50_CUiMX8.
Any Toradex carrier board that supports the MIPI CSI-2 interface connects to the camera kit out-of-the-box, hardware-wise:
- Ixora Carrier Board
- Verdin Development Board
- Dahlia Carrier Board
- Mallow Carrier Board
- Yavia Development Board
Software
BSP/Torizon OS 7
There is no support for the e-con systems AR0521 camera in BSP 7/Torizon OS 7. Moving forward, for testing and evaluation purposes, we recommend using other cameras such as Arducam OV5640, which supports BSP 7, or the Framos FSM:GO Cameras, with supports BSP 7 and Torizon OS 7. If you have any questions, feel free to ask for help from our developers in the Toradex Community.
BSP/Torizon OS 6
The kit works by adding a Yocto Project layer to the Toradex Linux BSP or Torizon OS BSP with the following Systems on Module:
Please follow the instructions for your chosen Operating System:
- Torizon OS 6: First Steps with CSI Camera Set 5MP AR0521 Color (Torizon)
- Toradex Linux BSP 6: First Steps with CSI Camera Set 5MP AR0521 Color (Linux)
BSP/TorizonCore 5
The kit works out-of-the-box with the following configurations:
- Apalis iMX8:
- TorizonCore 5: First Steps with CSI Camera Set 5MP AR0521 Color (Torizon)
- Toradex Linux BSP 5: First Steps with CSI Camera Set 5MP AR0521 Color (Linux)
The kit works by compiling and adding a device tree overlay on the following configurations:
- Verdin iMX8M Plus:
- Using TorizonCore 5: First Steps with CSI Camera Set 5MP AR0521 Color (Torizon)
- Using BSP 5: First Steps with CSI Camera Set 5MP AR0521 Color (Linux)
Revision History
Click to See the Product Numbering Scheme
Product Number (PID8) Format
The format of the 8-digits Product Number (PID8) is the following:
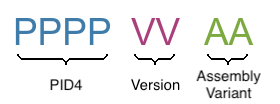
The below table describes the structure of the Product Number (PID8):
| Field | Description |
|---|---|
| PPPP | 4-digits number, indicating the Product Configuration (PID4) that describes the key properties of the product (e.g. Product Group, RAM capacity, etc.) |
| VV | 2-digits number, indicating the Major and Minor Version (in that order) |
| AA | 2-digits number, indicating the Assembly Variant |
See the complete list of available combinations on the Revision History table of the corresponding product page.
Example
Product number (PID8): 00291100:
0029: Apalis iMX6D 512MB
11: Major Version 1, Minor Version 1, Version V1.1 in short
00: Assembly Variant A
A specific product revision has a lifecycle defined by the product state. Learn more about it on the Product Change Notifications.
| Product # | Product Description | Changes from Previous Version | Release Date | PCN Document |
01641000 | CSI Camera Set 5MP AR0521 Color V1.0A | Initial Release | Q2, 2022 | |
01641100 | CSI Camera Set 5MP AR0521 Color V1.1A |
| Q4, 2023 |
Errata
None